KV Cache 的推理流程里,最容易混淆的一点是:历史 KV、当前 query 的 KV、生成 token 的 KV 究竟怎样合在一起。
一个常见说法会把它写成:
Kall=Khistory+Kquery
这个写法会把向量加法和序列追加混在一起。更贴近实际机制的写法是沿 token 序列维度拼接:
Kall=[Khistory; Kquery; Kgenerated]
value 也一样:
Vall=[Vhistory; Vquery; Vgenerated]
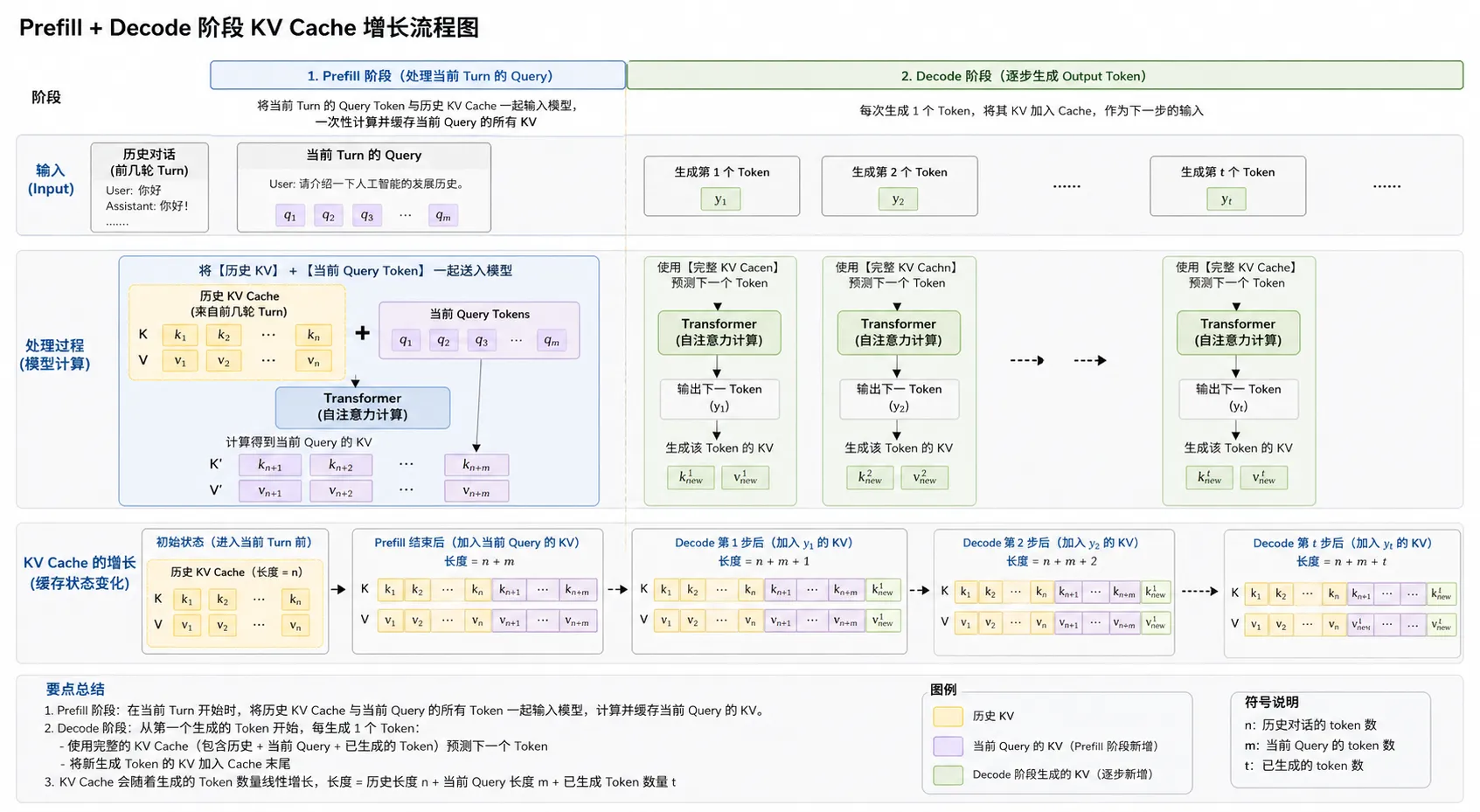
因此,KV Cache 的主线可以概括为:
历史 KV 已经写入,当前 query 通过 prefill 一次性追加,decode 阶段每生成一个 token 再追加一个新的 KV。
这篇文章讨论 decoder-only Transformer 的推理阶段。为了让公式聚焦在机制本身,前半部分暂时忽略 batching、paged attention、RoPE、MQA/GQA 和 kernel 细节,只看单层单头的基本形式;多层多头时,每一层、每个 head 都维护对应的 K/V cache。量化会在后文单独讨论。
符号表#
| 符号 | 含义 |
|---|
| H=(x1,…,xn) | 前几轮对话历史 token |
| Q=(q1,…,qm) | 当前用户 query token |
| Y=(y1,…,yT) | 当前轮已经生成或即将生成的输出 token |
| L=n+m | history 与 current query 拼接后的长度 |
| ℓ | Transformer 层下标 |
| N | Transformer 总层数 |
| Cs(ℓ) | 第 ℓ 层、长度为 s 的 KV cache |
| K1:s(ℓ),V1:s(ℓ) | 第 ℓ 层缓存中的 key 与 value 序列 |
| ki(ℓ),vi(ℓ) | 第 i 个 token 在第 ℓ 层写入 cache 的 key/value |
| Qi(ℓ) | 第 i 个 token 在第 ℓ 层当前计算得到的 query 向量 |
| αi,j(ℓ) | 第 i 个位置对第 j 个位置的 attention 权重 |
| hi(N) | 第 i 个位置经过最后一层后的 hidden state |
| Wvocab | LM head / vocab projection |
| S | 某一步 attention 原本可见的 KV 位置集合 |
| E | 被驱逐的 KV 位置集合 |
| R=S∖E | 驱逐后保留的 KV 位置集合 |
| k^j,v^j | 量化后近似保存的 key/value |
| ϵjK,ϵjV | key/value 量化误差 |
| δj | key 量化导致的 attention score 扰动 |
| α^j | 使用量化 key 计算得到的 attention 权重 |
1. 完整输入与 cache 形态#
前几轮对话历史 token 记为:
H=(x1,x2,…,xn)
当前用户 query token 记为:
Q=(q1,q2,…,qm)
当前轮 prefill 看到的完整输入是 history 与 query 的拼接:
X=H∥Q=(x1,…,xn,q1,…,qm)
长度为:
L=n+m
对第 ℓ 层 Transformer,把长度为 s 的 cache 写成:
Cs(ℓ)=(K1:s(ℓ), V1:s(ℓ))
其中 key 序列是:
K1:s(ℓ)=[k1(ℓ),k2(ℓ),…,ks(ℓ)]
value 序列是:
V1:s(ℓ)=[v1(ℓ),v2(ℓ),…,vs(ℓ)]
这里的方括号表示按 token 位置排列的序列。cache 的长度随 token 数增长,新增 token 对应的新 key/value 会追加到序列末尾。
2. 历史对话已经写入 KV#
如果前几轮 turn 已经完成 prefill,那么第 ℓ 层已经有历史 cache:
Cn(ℓ)=(K1:n(ℓ),V1:n(ℓ))
展开 key 序列:
K1:n(ℓ)=[kx1(ℓ),…,kxn(ℓ)]
展开 value 序列:
V1:n(ℓ)=[vx1(ℓ),…,vxn(ℓ)]
这部分对应前几轮对话。下一轮用户输入到来时,模型无需重新计算 x1,…,xn 的 K/V;它会把这段历史 cache 当作当前 query prefill 的前缀记忆。
3. 当前 query 的 prefill#
当前 query 是:
Q=(q1,…,qm)
prefill 阶段会把这 m 个 query token 一次性送进模型。对第 ℓ 层,每个 query token 都会产生自己的 key 和 value:
kqi(ℓ), vqi(ℓ),1≤i≤m
于是当前 query 写入的 key 序列是:
KQ(ℓ)=[kq1(ℓ),…,kqm(ℓ)]
value 序列是:
VQ(ℓ)=[vq1(ℓ),…,vqm(ℓ)]
将它们追加到历史 cache 后得到:
K1:n+m(ℓ)=[K1:n(ℓ); KQ(ℓ)]
V1:n+m(ℓ)=[V1:n(ℓ); VQ(ℓ)]
用 cache 记号写成:
Cn+m(ℓ)=Cn(ℓ)⊕KV(Q)
展开就是:
Cn+m(ℓ)=[KV(x1),…,KV(xn),KV(q1),…,KV(qm)]
这里的 ⊕ 表示追加。它改变的是 cache 的序列长度和可见位置集合,语义上接近 append,而非两个张量逐元素相加。
4. Query prefill 仍然遵守 causal mask#
当前 query 虽然一次性送入模型,内部仍然受到 causal mask 约束。
在完整序列中,qi 的位置是 n+i。它可以看到:
x1,…,xn,q1,…,qi
它看不到 query 内部更靠后的 token:
qi+1,…,qm
因此:
q1→x1,…,xn,q1
q2→x1,…,xn,q1,q2
一般地:
qi→x1,…,xn,q1,…,qi
prefill 的并行来自矩阵计算;因果性来自 mask。并行计算不改变每个位置的可见范围。
5. Prefill 阶段的 attention 公式#
对 query token qi,完整序列位置是 n+i。在第 ℓ 层,它的 attention score 只定义在 j≤n+i 的位置上:
sn+i,j(ℓ)=dkQn+i(ℓ)⋅Kj(ℓ)T,j≤n+i
softmax 后得到:
αn+i,j(ℓ)=∑r=1n+iexp(sn+i,r(ℓ))exp(sn+i,j(ℓ)),j≤n+i
attention 输出是:
on+i(ℓ)=j=1∑n+iαn+i,j(ℓ)Vj(ℓ)
把历史 token 和当前 query 内部 token 拆开:
oqi(ℓ)=j=1∑nαqi,xj(ℓ)vxj(ℓ)+r=1∑iαqi,qr(ℓ)vqr(ℓ)
这条公式给出 prefill 的核心语义:当前 query 中的第 i 个 token 会读取历史 KV,也会读取当前 query 中不晚于自己的 K/V。
6. Prefill 结束后预测第一个输出 token#
prefill 完成后,最后一个 query token qm 对应的位置是 n+m。经过最后一层得到 hidden state:
hn+m(N)
LM head 将它映射到词表 logits:
zn+m=Wvocabhn+m(N)
第一个输出 token 的分布是:
p(y1∣x1:n,q1:m)=softmax(zn+m)
然后通过采样、贪心或 beam search 选出:
y1∼p(y1∣x1:n,q1:m)
因此,prefill 的最后一个位置已经给出了第一个输出 token 的概率分布。decode 从生成出的 y1 开始继续向后推进。
7. Decode 阶段逐步追加生成 token#
生成 y1 之后,要预测 y2,需要把 y1 作为新输入 token 送入模型。第 ℓ 层会计算 y1 自己的 key/value:
KV(y1)=(ky1(ℓ),vy1(ℓ))
然后追加到 cache:
Cn+m+1(ℓ)=Cn+m(ℓ)⊕KV(y1)
展开为:
Cn+m+1(ℓ)=[KV(x1),…,KV(xn),KV(q1),…,KV(qm),KV(y1)]
此时最后位置的 hidden state 用来预测:
p(y2∣x1:n,q1:m,y1)=softmax(Wvocabhn+m+1(N))
生成 y2 后,再把 y2 喂入模型,得到:
KV(y2)
继续追加:
Cn+m+2(ℓ)=Cn+m+1(ℓ)⊕KV(y2)
展开为:
Cn+m+2(ℓ)=[KV(x1),…,KV(xn),KV(q1),…,KV(qm),KV(y1),KV(y2)]
然后预测:
p(y3∣x1:n,q1:m,y1,y2)
这就是 decode 的基本循环:每一步只处理最新 token,写入它自己的 K/V,再用当前 hidden state 预测下一个 token。
8. 一般递推形式#
假设已经生成:
y1,…,yt
那么第 ℓ 层 cache 是:
Cn+m+t(ℓ)=[KV(x1),…,KV(xn),KV(q1),…,KV(qm),KV(y1),…,KV(yt)]
下一个 token 的分布是:
p(yt+1∣x1:n,q1:m,y1:t)=softmax(Wvocabhn+m+t(N))
整体自回归分解为:
p(y1:T∣H,Q)=t=1∏Tp(yt∣H,Q,y<t)
用递推写法压缩整个流程:
Cn=Prefill(x1,…,xn)
当前 query prefill:
Cn+m,hn+m=PrefillWithCache(q1,…,qm; Cn)
第一个输出 token:
y1∼softmax(Wvocabhn+m)
decode 阶段,对 t≥1:
Cn+m+t,hn+m+t=DecodeStep(yt; Cn+m+t−1)
yt+1∼softmax(Wvocabhn+m+t)
最短的 cache 更新式是:
Ct+1=Ct⊕KV(new token)
prefill 一次性追加当前 query:
Cn+m=Cn⊕KV(q1,…,qm)
decode 每一步追加一个生成 token:
Cn+m+t=Cn+m+t−1⊕KV(yt)
这组递推还隐含一个重要工程事实:decode 阶段不会重新计算所有历史位置的 hidden state。每一步主要计算当前输入 token 的 Q/K/V,再用当前 Q 去读取已经保留的 KV cache。
9. Decode 单步会对所有保留 KV 打分#
看单层、单 head 的 decode attention。假设当前处理位置是 t,当前 hidden state 产生:
qt, kt, vt
cache 中保留了从 1 到 t 的 key/value:
K1:t=[k1,k2,…,kt]
V1:t=[v1,v2,…,vt]
当前 query 会和所有可见 key 打分:
st,j=dkqtkjT,j≤t
也就是:
qtk1T, qtk2T, …, qtktT
softmax 权重是:
αt,j=∑i=1texp(st,i)exp(st,j)
attention 输出是:
ot=j=1∑tαt,jvj
因此,decode 单步的 attention 可以写成:
qt⇒score all retained kj⇒weighted sum of vj
KV cache 节省的是历史 K/V 和历史 hidden state 的重复计算;当前 token 仍需要对保留 cache 做读取。
10. KV 驱逐后的 attention 变化#
设原本可见的 cache 位置集合是:
S={1,2,…,t}
现在驱逐一部分 KV:
E⊂S
保留下来的集合是:
R=S∖E
完整 attention 输出是:
o=j∈S∑αjvj
驱逐后,当前 token 看不到 E 中的 key/value,只能在 R 上重新归一化:
o′=j∈R∑αj′vj
其中:
αj′=∑i∈Rexp(si)exp(sj),j∈R
这一步带来两类变化:被驱逐 value 的贡献消失,保留下来的 value 权重重新分配。
把原始输出拆成保留部分和驱逐部分:
o=j∈R∑αjvj+e∈E∑αeve
驱逐 token 原本占用的 attention mass 记为:
ρ=e∈E∑αe
保留集合原本的总权重是:
1−ρ
由于 softmax 在剩余集合上重新归一化,驱逐后的权重可写成:
αj′=1−ραj,j∈R
因此:
o′=j∈R∑1−ραjvj
也可以写成:
o′=1−ρo−∑e∈Eαeve
两者差异为:
o′−o=1−ρρo−∑e∈Eαeve
这个式子给出直接判据:如果被驱逐 KV 原本的 attention mass 很小,ρ≈0,则 o′ 接近 o。如果被驱逐 KV 原本占用较大 attention mass,输出会明显偏离完整 cache 的结果。
11. 对下一个 token 分布的影响#
attention 输出变化会沿着残差连接、MLP 和后续层继续传播。最后一层 hidden state 从:
ht(N)
变为:
h~t(N)
完整 cache 下的 logits 是:
zt=Wvocabht(N)
驱逐后的 logits 是:
z~t=Wvocabh~t(N)
完整 cache 下的下一个 token 分布是:
p(xt+1∣x≤t)=softmax(zt)
驱逐后的分布是:
p~(xt+1∣x≤t)=softmax(z~t)
logits 差异为:
Δzt=z~t−zt=Wvocab(h~t(N)−ht(N))
因此,KV 驱逐的影响链路是:
evict KV⇒attention output changes⇒hidden state changes⇒logits change⇒next token distribution changes
用条件分布的角度看,完整 cache 对应:
pfull(xt+1)=f(xt,Ct)
驱逐后对应:
pevict(xt+1)=f(xt,C~t)
其中:
Ct=[KV(x1),…,KV(xt)]
C~t=[KV(xj)]j∈R
一般情况下:
pevict(xt+1)=pfull(xt+1)
好的驱逐策略希望两者尽量接近:
pevict(xt+1)≈pfull(xt+1)
这就是 KV 驱逐的近似目标:在 memory 和计算预算下降低 cache 长度,同时尽量保持输出分布。
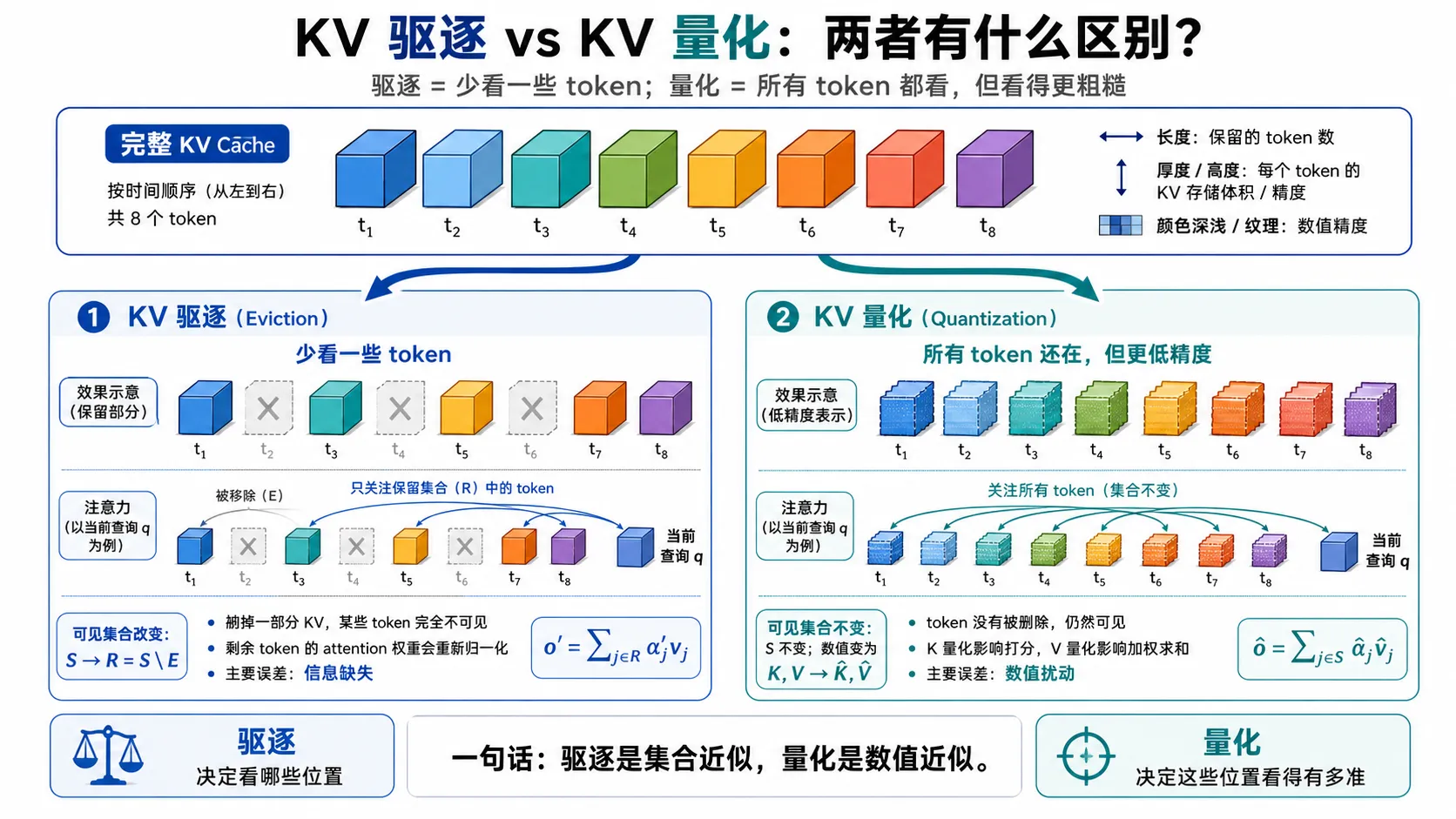
12. KV 量化:同一集合上的数值近似#
KV 驱逐改变可见位置集合:
S→R=S∖E
KV 量化保留同一个集合 S,改变每个位置上 K/V 的数值表示。原始 key/value 是:
kj, vj
量化后保存为低精度近似:
k^j=kj+ϵjK
v^j=vj+ϵjV
其中 ϵjK 和 ϵjV 是量化误差。此时 token 仍然在 cache 中,当前 query 仍然可以访问这些位置;变化发生在 attention score 和 value 内容的数值精度上。
原始 attention score 是:
sj=dkqtkjT
使用量化 key 后:
s^j=dkqtk^jT
代入 k^j=kj+ϵjK:
s^j=dkqt(kj+ϵjK)T
展开为:
s^j=sj+dkqt(ϵjK)T
令:
δj=dkqt(ϵjK)T
于是:
s^j=sj+δj
这说明 key 量化首先扰动 attention score。softmax 权重随之变成:
α^j=∑iexp(si+δi)exp(sj+δj)
value 量化影响加权求和中被读取的内容:
v^j=vj+ϵjV
因此,量化后的 attention 输出是:
o^t=j∈S∑α^jv^j
代入量化 value:
o^t=j∈S∑α^j(vj+ϵjV)
展开为:
o^t=j∈S∑α^jvj+j∈S∑α^jϵjV
原始输出是:
ot=j∈S∑αjvj
两者相减:
o^t−ot=j∈S∑(α^j−αj)vj+j∈S∑α^jϵjV
这条式子把量化误差拆成两项。第一项来自 key 量化导致的权重变化;第二项来自 value 量化导致的内容扰动。
K quantization⇒attention weight perturbation
V quantization⇒value content perturbation
所以,驱逐和量化属于两类近似。驱逐是集合近似,量化是数值近似。
| 方法 | 改变了什么 | attention 集合 | 主要误差形态 |
|---|
| KV 驱逐 | 删除部分 token 的 K/V | S→R | 信息缺失与重新归一化 |
| KV 量化 | 近似每个 token 的 K/V 数值 | S 保持不变 | score 扰动与 value 扰动 |
| Sliding window | 只保留最近窗口 | S→ recent tokens | 结构性遗忘 |
| Sparse attention | 只读取被选中的位置 | S→ selected tokens | 稀疏可见 |
更短地说:
eviction: S→R
quantization: K,V→K^,V^
驱逐决定当前 query 能看哪些位置,量化决定这些位置以多高的数值精度参与计算。
13. 量化的系统收益与边界#
KV cache 量化的直接收益主要有两类。
第一类是省显存。FP16 KV 每个元素通常占:
16 bits
如果量化到 INT8,每个元素变成:
8 bits
理论 cache 容量约减半。若使用 4-bit 表示:
4 bits
理论容量约变成四分之一。实际收益还会受到 scale、zero point、分组大小、packing、对齐和 kernel 实现影响。
第二类是降低 memory bandwidth 压力。decode 阶段经常是 memory-bound,因为每生成一个 token 都要读取大量历史 KV:
K1:t,V1:t
量化后读取的是:
K^1:t,V^1:t
低 bit 表示减少从显存搬运的数据量,长上下文时收益更明显,因为 KV cache 大小随序列长度线性增长。
不过,量化不会改变传统自回归 decode 的因子分解:
p(y1:T∣X)=t=1∏Tp(yt∣X,y<t)
cache 更新仍然是 append-only:
Ct+1=Ct⊕KV(yt)
区别在于 cache 中保存的是低精度 K/V:
Ct+1=Ct⊕KV(yt)
因此,KV 量化主要是存储、带宽和数值精度层面的系统优化。它可以加速或放大 batch,但不会改变逐 token 自回归生成的基本形式。
量化还可以按对象分成几类。
| 类型 | 近似对象 | 影响路径 |
|---|
| Weight quantization | W→W^ | 改变模型权重和整个函数 Fθ |
| Activation quantization | h→h^ | 改变中间激活,并进一步影响 q,k,v |
| KV cache quantization | K1:t,V1:t→K^1:t,V^1:t | 主要改变 decode 阶段读取历史 cache 的精度 |
对当前主题最相关的是 KV cache quantization。它只处理缓存中的历史 K/V,目标是在尽量保持 attention 行为的同时减少显存占用和带宽压力。实际系统中通常还会区分 key 和 value 的分布特性,分别选择按 channel、按 token 或按 group 的量化粒度。
14. 驱逐与量化可以叠加#
驱逐和量化可以同时使用,因为二者作用在不同层面。驱逐先决定保留哪些位置,量化再决定这些位置的 K/V 用多高精度保存。
完整 KV attention 是:
ot=j∈S∑αjvj
只做量化:
o^t=j∈S∑α^jv^j
只做驱逐:
ot′=j∈R∑αj′vj,R=S∖E
驱逐加量化:
o~t=j∈R∑α~jv^j
其中:
α~j=softmaxj∈R(dkqtk^jT)
这时有两层误差:集合从 S 收缩到 R,数值从 K,V 变为 K^,V^。
| 问题 | 对应方法 |
|---|
| KV cache 太大 | KV quantization / eviction / compression |
| 显存带宽不够 | KV quantization / paged attention / fused kernels |
| 长上下文信息不足 | cache policy / retrieval / compressed memory |
| 单步读取成本高 | KV quantization / sparse attention / fused kernels |
因此可以把两者压成一句话:
eviction chooses where to look;quantization chooses how precisely to store what remains.
15. 一个最小例子#
假设当前 token 对 5 个历史位置的 attention 权重是:
[α1,α2,α3,α4,α5]=[0.05,0.10,0.60,0.15,0.10]
如果驱逐第 1 个 token:
ρ=0.05
保留下来的权重只需要除以 0.95。新的权重大约是:
[0.105,0.632,0.158,0.105]
变化相对小,因为被移除的 attention mass 只有 5%。
如果驱逐第 3 个 token:
ρ=0.60
保留下来的原始权重是:
[0.05,0.10,0.15,0.10]
重新归一化后变成:
[0.125,0.25,0.375,0.25]
原本最重要的 v3 消失,其他 value 被放大。此时 hidden state 和下一个 token 分布都可能发生明显变化。
16. 哪些 KV 驱逐后影响更大#
驱逐影响通常和当前 query、当前层、当前 head 的 attention 分布有关。经验上,下面几类 token 更容易带来较大影响。
第一类是最近 token 的 KV。语言生成具有强局部连续性,下一个词经常依赖最近几个 token 的句法和语义状态。
第二类是指令 token 的 KV。例如“用中文回答”“只给结论”“不要输出代码”这类约束会持续影响后续生成。
第三类是实体、变量、数字和约束条件的 KV。例如姓名、日期、函数名、变量定义、边界条件。后续推理一旦引用这些信息,驱逐就会增加遗忘或错配风险。
第四类是 attention sink token。有些模型会对开头 token、特殊 token 或固定格式 token 保持较高 attention。随意移除这些位置可能影响模型状态稳定性。
第五类是当前推理链中被反复引用的信息。例如前文定义:
a=3,b=5
后文要计算:
a+b
如果相关 KV 被驱逐,模型仍可能保留部分语义线索,但直接可寻址的信息已经减少,错误率通常会上升。
17. 历史、query、generated token 的完整展开#
用一个小例子把流程串起来。假设历史有 3 个 token:
H=(x1,x2,x3)
当前 query 有 2 个 token:
Q=(q1,q2)
历史 cache 是:
C3=[KV(x1),KV(x2),KV(x3)]
当前 query prefill 后:
C5=[KV(x1),KV(x2),KV(x3),KV(q1),KV(q2)]
用 q2 的最终 hidden state 预测第一个输出:
p(y1∣x1,x2,x3,q1,q2)
生成 y1 后,下一步 decode 把 y1 追加进 cache:
C6=[KV(x1),KV(x2),KV(x3),KV(q1),KV(q2),KV(y1)]
然后预测:
p(y2∣x1,x2,x3,q1,q2,y1)
再生成 y2,继续追加:
C7=[KV(x1),KV(x2),KV(x3),KV(q1),KV(q2),KV(y1),KV(y2)]
然后预测:
p(y3∣x1,x2,x3,q1,q2,y1,y2)
cache 长度的变化是:
n→n+m→n+m+1→n+m+2→⋯
对应的语义是:
history→history+query→history+query+y1→history+query+y1+y2→⋯
18. 总结#
KV Cache 可以总结成一条追加式状态递推:
Ct+1=Ct⊕KV(new token)
history cache 提供前几轮对话的已计算 K/V:
Cn
当前 query prefill 一次性追加:
Cn+m=Cn⊕KV(q1,…,qm)
decode 阶段逐 token 追加生成结果:
Cn+m+t=Cn+m+t−1⊕KV(yt)
每个 decode step 的当前 query 会对保留在 cache 中的 key 打分:
ot=j∈S∑αjvj
如果驱逐一部分 KV,attention 变成:
ot′=j∈R∑αj′vj,R=S∖E
驱逐造成的变化可以拆成两部分:被移除 value 的贡献消失,剩余 value 的权重重新归一化。只要被驱逐位置原本占有非零 attention mass,hidden state、logits 和下一个 token 分布就可能随之改变。
如果保留集合不变,只量化 K/V,attention 变成:
o^t=j∈S∑α^jv^j
其中:
k^j=kj+ϵjK,v^j=vj+ϵjV
量化造成的变化也可以拆成两部分:key 量化扰动 score 和 attention 权重,value 量化扰动被加权读取的内容。
三类近似可以按层级区分:
KV eviction:S→R
KV quantization:K,V→K^,V^
block/diffusion decoding:token-wise AR→block/refinement/denoising
合在一起,KV Cache 的机制主干是:
history KV+query prefill+incremental decode+retained/quantized KV attention
这也是理解长上下文压缩、KV 驱逐、KV 量化、sliding window attention、sparse attention 和 block/diffusion decode 的基础:它们分别改变可见集合、数值精度、保留粒度、读取策略或生成范式。