Transformer 的持续控制状态:KV Cache 与残差流如何塑造 Agent 决策
从现象锚定、反例缩因、toy 直觉到因果干预,拆解 system prompt、tool schema 和 plan 如何持续影响 Agent 决策。
一条很早写下的 system prompt,为什么能在几千个 token 之后,仍然左右模型是否调用工具、是否先规划、是否保持某种输出风格?
这是一个机制问题:控制信号究竟被写进了哪里,又通过什么路径持续影响后续决策?
在 Agent 场景里,Transformer 已经成为一个决策引擎。它不仅生成句子,还要:
- 判断是否进入
tool_call - 维持 plan / reflection / memory write 的节奏
- 持续遵守 schema、角色约束和外部运行时规则
这时会出现一个非常稳定的现象:
- 很早注入的
System Prompt会长期改变工具调用的先验概率 - 早期给出的
Tool Schema会在后续关键位置被反复“读回” - 模型一旦先写出 plan,后续输出往往会长期服从这段 plan 的结构
本文把这种现象称为 持续控制状态(Persistent Control State)。这是一个研究视角,关注的核心是:哪些 token 具有更高的控制势能,以及这些势能如何跨步影响后续决策概率。
这篇文章和之前两篇 Agent 分析有关联,可以看作它们的”模型内侧”补充:
前两篇主要讲外部系统如何组织上下文和工具,这一篇讲:这些上下文进入 Transformer 之后,怎样变成一种可持续寻址的控制状态。
我会按这样一条线来讲:
坐实现象 → 反例缩因 → Toy 直觉 → 统一框架 → 可证伪假说 → 工程落地
这篇文章的定位是一次机制探索,重点在于把问题拆成足够清晰、足够可验证的结构,而非给出封闭定理。
一、先坐实现象:这个现象是真实的,而且跨场景稳定#
先不急着解释,先把现象钉住。
在 Agent 系统里,下面三类现象非常常见,而且并不依赖某个特定 prompt 模板:
| 场景 | 早期控制 token | 后续表现 |
|---|---|---|
| 工具调用 | System Prompt 里的工具使用规则、Tool Schema | 后续更容易进入 tool_call,并输出更合法的结构化参数 |
| 规划与反思 | First make a plan、Reflect before final answer | 模型后续更倾向于先写 plan / reflection,再执行动作 |
| 风格与角色 | “简洁回答”“默认专业语气”“优先给结论” | 后续多个回合里,句法长度、措辞和结构持续偏移 |
更重要的是,这些影响通常具有三个特点:
-
它们跨步持续。
影响范围可能达几百上千个 token,远超紧接着的几十个。 -
它们跨阶段持续。
即使中间已经穿插了工具结果、用户追问和模型自己的中间思考,早期控制仍可能继续存在。 -
它们超越了纯风格现象的范畴。 很多时候它们改变的是离散决策分布,比如是否调用工具、是否进入某个 schema、是否先规划。
这件事之所以值得研究,是因为它说明:
Transformer 里存在某种可持续、可被后续步骤重新访问的控制状态。
“控制状态”这个说法比”记忆”更准确。这里发生的远不止信息保留:
- 某些早期 token 被赋予了更高的后续决策权重
- 它们在未来会被有选择地重新读回
- 这些被读回的内容会改写当前步的 logits 和动作分布
也就是说,现象的实质是”某些早期 token 还在持续操纵后续行为”。
二、为什么这件事重要:它直接影响 Agent 设计#
要把这件事从“有趣现象”升级为“值得研究的问题”,至少有三层理由。
1. 解释性价值#
很多 Agent 经验法则其实都在隐含地利用这种持续控制机制,例如:
- 为什么 system prompt 对工具调用成败有决定性影响
- 为什么 planning 往往能提升复杂任务稳定性
- 为什么某些 schema 写法会显著改变工具调用质量
不理解这些现象的机制,就只能停留在”调 prompt 看手感”的经验层。
2. 方法性价值#
一旦知道控制状态是怎样形成和传播的,就能更系统地设计:
- 更稳的 system prompt
- 更有效的 tool schema
- 更有杠杆的 plan / reflection 模板
- 更可观测的 Agent 调试工具
也就是说,这不是纯解释工作,它直接指向方法设计。
3. 结构性价值#
更深一层地看,这个问题在问的是:
Transformer 里是否存在一种“可持续控制未来决策”的特殊状态结构?
如果答案是肯定的,那么它不仅对 Agent 工程重要,对理解 Transformer 本身也重要。因为这涉及:
- 哪些中间状态真正具有跨步持续性
- 哪些 token 更容易成为后续查询的控制锚
- 模型内部的“控制面”与“内容面”是否可以被区分
所以研究持续控制状态,不只是为了解释 prompt 为什么 work,更是在追问 Transformer 的一种更细的功能结构。
三、把问题 sharpen:到底在问什么#
如果只问一句“为什么早期 prompt 会持续生效”,问题太大,最后很容易落回空话。
更好的做法是把它拆成几个可操作的问题:
-
什么才是真正跨步持久化的载体?
是残差流本身,还是每层缓存下来的 K / V,还是二者加上后续新 token 的共同作用? -
哪些 token 具有更高的控制势能?
为什么有些 token 能长期影响工具调用和 planning,而另一些 token 很快就失效? -
这种控制是怎样传播的?
是未来 query 直接读回早期 K / V,还是早期控制先影响中间输出,再由这些新输出继续扩散? -
如何证明它是因果而非巧合? 能不能通过 span ablation、KV ablation、activation patching 等手段,把这条路径真正打断或救回?
至此,问题变得具体:
某些 token 如何被编码为可持续的控制状态,并在后续 generation 中改变决策分布?
四、先做反例缩因:哪些解释是不够的#
在机制探索里,最忌讳的一件事就是一上来拍脑袋给答案。更好的方法是先做排除法,把解释空间缩小。
下面几种常见解释都抓到了一部分直觉,但单独拿出来都不够。
| 常见解释 | 为什么不够 | 它要求接受什么 |
|---|---|---|
| “因为这些 token 还在上下文窗口里。” | 上下文窗口只是“还可见”,不等于“还会被高强度读回”。很多早期 token 一样留在上下文里,但后续几乎没人访问。 | 需要区分“仍在窗口中”和“形成可持续控制锚” |
| “因为残差流在长期保存信息。” | 残差流是当前 token 在当前步的工作带,不是直接跨步缓存。推理时真正被持久化下来的是历史位置的 K / V。 | 跨步持久化的核心载体更接近 KV Cache |
| “因为模型有语气惯性。” | 风格延续可以部分解释语气问题,但很难解释离散模式切换,例如是否进入 tool_call、是否按 schema 输出、是否先规划。 | 这里不只是风格惯性,而是决策分布被持续改写 |
| “因为 prompt 写得好。” | 这是结果描述,不是机制描述。它没有回答:到底是什么内部状态让后续查询不断回访这些早期 token。 | 需要把“prompt 好”翻译成内部状态结构 |
做完这一步,解释空间就会明显收缩。
至少可以提出一个更强的中间判断:
持续控制远比”文本还在上下文里”复杂,更接近某些早期 token 被编码成了可被后续反复寻址的控制状态。
这个判断还不是理论,但它已经比“模型记住了”精确得多。
五、最小直觉:先看一个最简单的 toy 机制#
在进入完整框架前,先看一个极简 toy。
假设只有一个关键控制 token c,它的语义是:
“如果当前任务涉及文件读取,就优先调用工具。”
后面某一时刻,模型来到了一个关键决策位置 t。这时它需要在两条路之间选一个:
- 继续自然语言解释
- 进入
tool_call
先把复杂模型压到最小形式,只看一层、一个 query、一个历史控制 token:
如果当前决策位置的 q_t 与控制 token 的 k_c 匹配度很高,那么注意力会把 v_c 重新读回来:
于是当前步的 hidden state 会被这个控制 token 往某个方向推:
- 更接近“该调用工具”的局部表示
- 更远离“直接自由回答”的局部表示
最后这种偏移会反映在 logits 上:
也就是说,这个 toy 里真正关键的是:
- 它被编码出了一个未来容易命中的
key - 它携带了一个足以改变决策分布的
value - 后续关键位置的
query会主动去找它
从这个角度看,一个关键 token 更像是上下文中埋下的一枚控制寄存器:
Key决定“未来什么情况会来读我”Value决定“被读到时我能施加什么影响”
当然,这个 toy 只能给第一层直觉。它还没有解释:
- 多层结构中的分工
- 为什么有些 token 更容易成为控制锚
- 为什么控制会持续很多步
- 为什么 planning / reflection 还会通过新生成 token 继续复制自己
但它至少把一个核心动作讲清楚了:
持续控制的最小机制:未来查询会主动回访某个早期状态,把它携带的控制量重新搬回来。
六、从 toy 到真实模型:完整的五步机制链#
有了最小直觉之后,再回到真实的自回归 Transformer。一个早期控制 token 对未来产生持续影响,大致要经过五个步骤。

6.1 状态编码:token 先被写进残差流#
一个 token 进入模型后,会先变成 embedding,再沿着每一层的残差主干不断演化。若把位置 t 在第 l 层的隐藏状态写成 h_t^l,可以粗略理解为:
残差流的角色是当前步所有计算都必须经过的主通道,承担的是即时计算,而非长期存储。所以任何控制信息,首先都得被写进残差流,才能继续被投影和传播。
6.2 投影:同一个状态被分成 Q / K / V#
在每一层,隐藏状态会被投影成三份:
这里可以把三者分别理解为:
- Query:我现在在找什么
- Key:我将来会在什么情形下被找
- Value:我一旦被找回,能提供什么影响
对于持续控制来说,这一步非常关键。一个 token 的长期价值,取决于它能否形成:
- 高可匹配的
key - 高可复用的
value
6.3 持久化:过去 token 的 K / V 被缓存#
进入解码阶段后,所有过去位置 s < t 的 k_s^l 和 v_s^l 会被缓存下来:
这就是 KV Cache。
这里要特别把一个常见混淆掰开:
- 残差流 是当前 token、当前层里的工作带
- KV Cache 才是历史 token 被跨步持久化下来的可寻址状态
追问”模型内部真正被保留下来的长期状态是什么”,KV Cache 比残差流更接近正确答案。
这里还有一个容易产生困惑的问题:如果 KV 一旦写入就不变,为什么更深层的表示会”更语义、更整体”?

关键在于区分两个不同概念:
- Hidden State(残差流):逐层演化,每经过一层 Attention + MLP,表示会变得更抽象、更整合上下文。Layer 0 的表示是词法级的,Layer 22 的表示已经编码了任务模式和角色信息。
- KV Cache:每层独立写入一份 K/V 快照,写完即冻结。后层不会回改前层的 KV。
所以”更深层语义更整体”描述的是 hidden state 的逐层变换,”旧 KV 不变”描述的是 cache 的写入机制。二者互补:模型在更深层生成更抽象的新表示,这些新表示以该层自己的 K/V 形式写入缓存,供未来 token 检索。Cache 里存的实际上是一串分层快照——浅层 K/V 保留局部特征,深层 K/V 承载高层语义,后续 query 可以在不同层选择性地读取不同粒度的控制信号。
6.4 读回:新的 Query 去匹配旧的 Key#
当生成新 token t 时,当前层会用 q_t^l 去匹配历史位置的 k_s^l:
然后用这些权重把对应的 v_s^l 聚合回来:
这一步就是持续控制真正起作用的地方。
如果某个早期 token 是:
- 一段 system instruction
- 一个 tool schema
- 一段 plan / reflection
- 一个结构边界非常清晰的控制标记
那么很多未来位置的 query 都可能重新访问它。于是这个 token 的 value 会在多个未来时刻被不断搬运回来,反复改写当前状态。
6.5 显化为动作:hidden state 最终改写 logits#
在最后一层,聚合后的表示会被映射成 logits:
这些 logits 直接决定当前步更可能输出什么:
- 是继续自然语言,还是进入
tool_call - 是直接回答,还是先写
Plan: - 是维持简洁风格,还是进入长篇铺垫
- 是不是按 memory schema 去组织输出
如果再把 Agent scaffold 也算进去,事情就更进一步了:
- 模型输出了
tool_call,外部执行器真的会调用工具 - 模型输出了 memory write,外部系统真的会更新记忆
- 模型输出了 plan,这段 plan 又会成为新的上下文,被未来再次访问
于是控制不再只停留在 logits 层,而会变成:
内部状态偏移 → 输出动作 → 新上下文生成 → 下一轮控制继续
七、统一框架:两条传播路径,三层载体#
做到这里,零散观察已经足够多了,需要一个统一框架把它们收起来。

我更倾向于用下面这个框架来理解 Agent 中的持续控制状态:
三层载体#
| 组件 | 角色 | 物理载体 |
|---|---|---|
| 残差流(Residual Stream) | 当前工作区 | 瞬时激活值 |
| KV Cache | 可寻址寄存器组 | 跨步持久化的 Key / Value |
| Agent Scaffold | 外部执行器 | 把输出解释成动作的运行时框架 |
两条传播路径#
路径一:直接 KV 读回#
这条路径解释的是:
- 为什么 system prompt 明明很早,但关键决策位置仍然能直接回访它
- 为什么 tool schema 会在参数生成时被反复引用
- 为什么删掉某些早期 K / V,后续行为就会立刻衰减
这是最直接的“控制寄存器”路径。
路径二:控制被写进新 token#
这条路径解释的是:
- 早期 prompt 要求“先规划”
- 模型真的输出了一段 plan
- 这段 plan 成为新的上下文
- 后续步骤又不断读回这段新的 plan
于是持续控制不再只来自最初的 prompt,而会来自它诱导写下来的次级控制状态。
这也是为什么在 Agent 中,planning、reflection、memory write 非常关键:
它们不仅是“结果”,也会变成新的控制源。
一个更准确的统一判断#
因此,如果要把这篇文章压成一句统一判断,我会这样说:
持续控制状态来自多重机制的叠加:残差流中的写入、KV Cache 中的跨步持久化、以及 scaffold 放大后的新 token 回写,共同形成控制闭环。
八、哪些 token 具有更高的“控制势能”#
既然统一框架已经有了,下一步自然就是问:什么样的 token 更容易成为控制锚?
我认为高控制势能的 token,通常至少满足以下几类条件。
8.1 语义抽象度高#
越抽象、越能覆盖很多未来决策的 token,越容易被长期复用。例如:
- “优先调用工具,不要猜测”
- “先规划,再执行”
- “输出必须符合 schema”
相比之下,一条只约束某个局部细节的 token,更像一次性约束,难以形成持续控制状态。
8.2 结构上高度显著#
带有明显结构边界的 token 往往更容易形成稳定锚点,例如:
- XML / JSON 标签
- Tool schema 中固定字段名
Plan:、Reflection:、Memory:这类显式相位切换标记
这些 token 的意义不只是“更好读”,而是它们更容易被模型编码成将来可复访的控制锚。
8.3 位于因果链上游#
在 causal Transformer 里,位置更早的 token 理论上拥有更大的潜在影响范围。
但“早”本身不是充分条件,更准确的表述是:
越靠前的 token 拥有更大的控制半径,但只有那些 K / V 对大量未来 query 仍然有用的 token,才会真正形成高控制势能。
8.4 容易被 scaffold 放大#
有些 token 在模型内部未必最强,但一旦被外部系统接住,就会被放大成高杠杆动作。
例如:
- 一段 schema 让模型更容易输出合法
tool_call - 工具一旦真的执行,结果会再次进入上下文
- 新上下文又会进一步改变后续 query 和 logits
所以在 Agent 场景里,一个 token 的控制势能不能只看模型内部,还得看它是否会被外部运行时放大。
九、这篇是一组可证伪的机制假说#
到这里,需要诚实地说一句:这篇文章停留在机制探索层面,尚未形成封闭理论。目前还没有一个像优化理论那样的闭式定理,去完全刻画控制势能、注意力读回和 scaffold 放大之间的关系。
但这不代表它只能停留在空泛直觉。更合适的做法是把它收束成一组可证伪假说。
假说 1:KV Cache 是跨步持久化的核心载体,残差流负责单步内计算#
残差流在单步内极其重要,但真正把历史状态跨步保存下来、供未来反复读取的,是每层缓存下来的 K/V。
这意味着:
- 关注长期控制,不能只盯着 residual stream
- 必须把 KV cache 当作一级研究对象
假说 2:高控制势能 token 的本质,是“更容易被未来 query 命中的 key”与“更能改写当前决策的 value”#
这句话看起来简单,但它把“好 prompt”翻译成了一个更可研究的内部结构:
- 命中率问题:什么 token 更容易被未来 query 找到?
- 杠杆问题:什么 value 更能稳定改写 logits 分布?
假说 3:持续控制通常同时走两条路#
也就是前面说的两条路径:
- 直接的 KV 读回
- 受控制影响的新 token 再次写回上下文
如果这个假说成立,那么 planning / reflection / memory write 不只是“让人类更好看懂模型思路”,而是在主动写新的控制寄存器。
十、怎么验证:五种因果干预方法#
既然这是机制假说,就必须配一组能真正打断和救回这条路径的方法。
10.1 跨度消融(Span Ablation)#
直接删掉某段早期上下文,例如 system prompt 里的工具定义。
观察:
tool_call相关 logits 是否显著下降- 输出是否从结构化动作退化为自由文本
- planning / reflection / memory write 是否随之衰减
这一步先回答:这段早期文本到底是不是重要。
10.2 KV Cache 消融(KV Cache Ablation)#
更强的一步是:
- 保留原始输入文本
- 但在推理时清空某些特定早期 token 对应的 K / V
如果文本仍在,但对应的 K/V 一被拿掉,后续 planning / tool selection 就明显衰减,那么就能更直接地说明:
持续影响依赖于未来步骤持续读取这些历史位置的 K/V——文本仍然存在并不足够。
10.3 激活修补(Activation Patching)#
构造两段 prompt:
- A:会稳定调用工具
- B:不会调用工具
如果把 A 在某层、某位置的激活或 K/V patch 到 B 的对应位置,然后 B 的工具调用意图被“救回来”,就说明该位置在该层确实承载了关键控制信号。
这能帮助回答:
- 控制信号主要在哪些层成形
- 是 residual stream 更关键,还是某些 attention 输出更关键
- tool schema、plan、reflection 分别主要作用在哪些层
10.4 Logit Lens / Probe#
在中间层训练线性 probe,去预测:
- 模型是否即将进入
tool_call - 模型是否已经进入 planning / reflection 模式
这能让控制状态逐层“显影”。
它不直接等于因果证明,但非常适合做观测。
10.5 注意力追踪(Attention Tracing)#
在真正发生动作决策的关键 token 位置,追踪高层 attention head,常常会看到:
- 当前 token 正在强力读回 system prompt
- 或者正在读回前面自己生成的 plan / reflection token
但要特别注意:
高 attention weight 是因果线索,不等于因果本身。
所以 attention tracing 最好和 ablation / patching 联合使用。
十一、实验验证:在 Qwen2.5-0.5B-Instruct 上的机制观测#
上面五种方法都已经有了操作定义。下面用一组真实实验来走完这条链条,看看前面的假说在真实模型上能得到多少支撑。

实验设置#
模型选用 Qwen2.5-0.5B-Instruct(24 层 Transformer,约 5 亿参数),体积极小但具备 instruction following 和工具调用倾向。
Prompt 结构如下:
<|im_start|>system
You are a tool agent. Use specific formatting [TOOL] add(x,y).
<|im_end|>
<|im_start|>user
What is 15 plus 30?
<|im_end|>
<|im_start|>assistant
[模型已经生成了 [,下一步最可能输出什么?如果 system prompt 中的工具指令真正形成了持续控制状态,模型应该以高概率继续输出 TOOL(即 TO + OL)。所有实验均在单张 RTX 3090 上运行,按”从观测到因果”的顺序依次展示。
11.1 概率偏移:System Prompt 将工具调用概率提升了四个数量级#
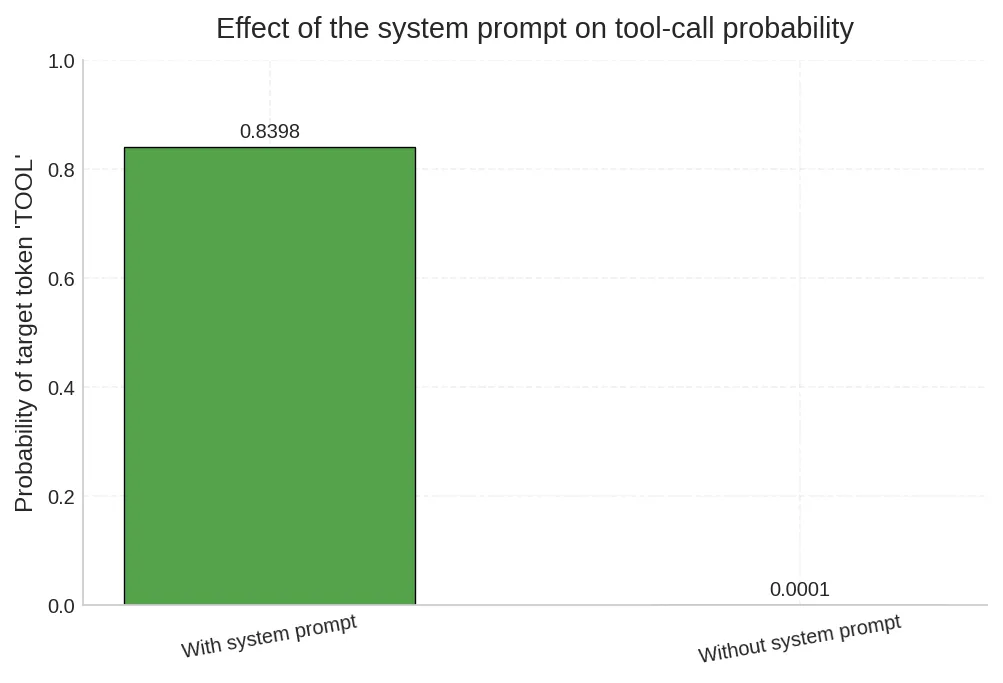
最基础的一步:直接对比有无 system prompt 时,模型在决策位置输出 TOOL 的概率。
| 条件 | TOOL 概率 | Top-1 预测 |
|---|---|---|
| 含 system prompt | 83.98% | TO(TOOL 的首 token) |
| 去掉 system prompt | 0.008% | 1(直接给数字答案) |
概率提升约 10000 倍。去掉 system prompt 后,模型的 top 预测变成了 1、The、Solution——完全退化为自然语言回答模式。
这对应第一节的判断:早期注入的控制 token 确实在几十个 token 之后仍然大幅改写了决策分布。现象已坐实。
11.2 逻辑透镜:工具调用信号在最后两层”结晶”#
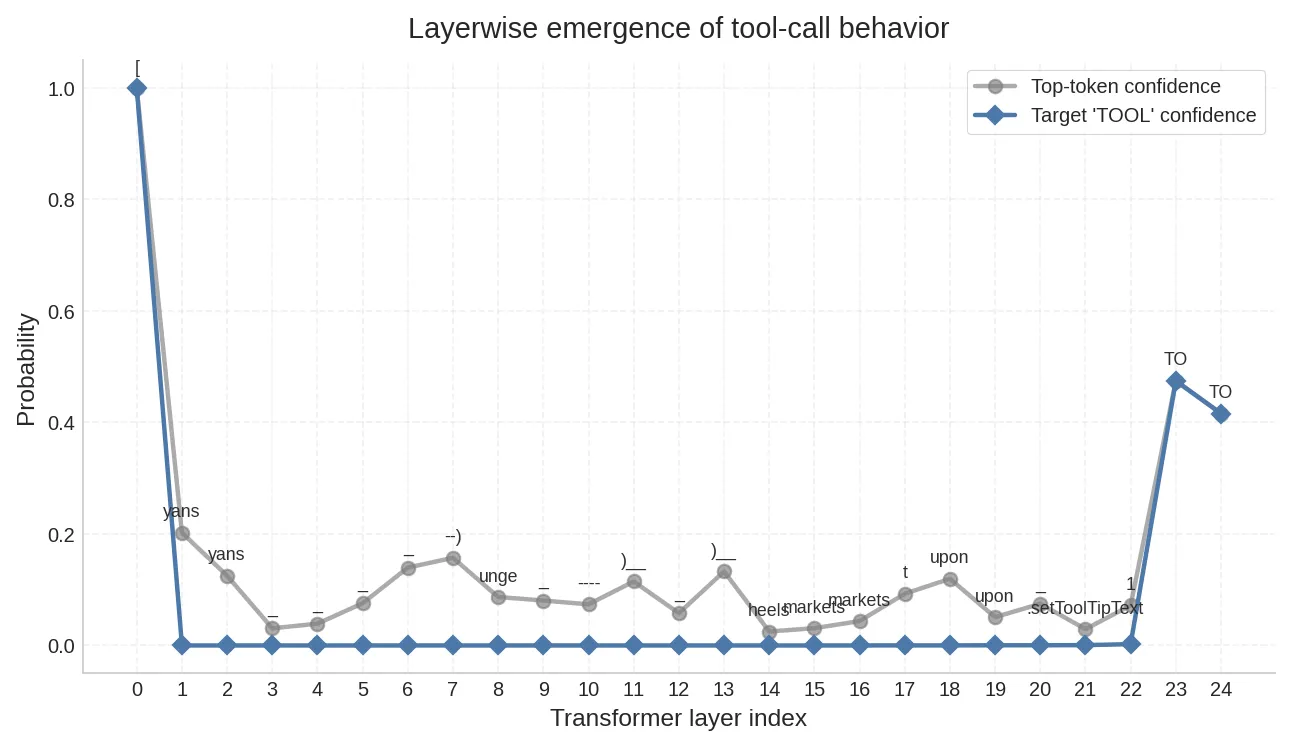
Logit Lens 把每一层的隐藏状态都投影到词表空间,观察”如果在这一层就做决策,模型会输出什么”:
for i, layer_state in enumerate(hidden_states):
# 取最后位置的隐藏状态,经 final LayerNorm 后投影到词表
logits = lm_head(final_norm(layer_state[0, -1, :]))
probs = softmax(logits, dim=-1)
# 此时 probs 就是"如果在第 i 层就输出"的概率分布结果呈现出一个清晰的 U 形结构:
- Layer 0(Embedding 层):Top 预测是
[,概率接近 1.0。这是 embedding 层的直接映射——当前位置就是[,投影自然命中自身,此时模型尚未做任何计算。 - Layer 1–21(中间层):
TOOL信号完全消失。Top 预测在yans、unge、markets、.setToolTipText之间游走,概率均低于 0.15。模型正在做复杂的内部计算,但决策尚未成形。 - Layer 22–24(最后三层):
TO突然涌现为 Top 预测,概率从 0 跃升至约 0.5。
这说明:工具调用决策在中间层被”隐式编码”在残差流中,直到最后两三层才被”解码”为显式的 token 选择。控制状态的存在和控制状态的显化,是两个不同时刻。
11.3 注意力回溯:决策点在持续寻址哪些历史 token#
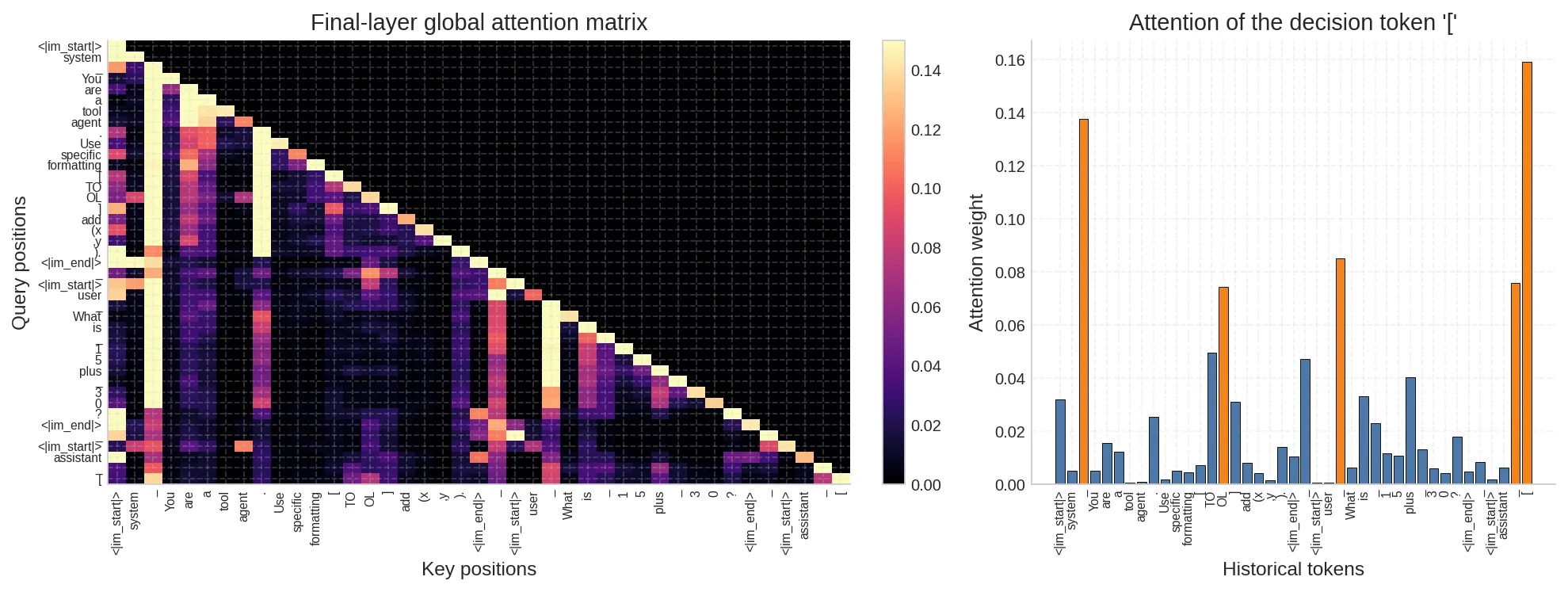
左侧是最后一层的完整注意力矩阵,右侧是决策 token [ 对所有历史 token 的注意力分布。橙色标注的是注意力权重超过 0.05 的位置。
几个显著的被寻址目标:
- 结构边界标记(
<|im_start|>、system、assistant):承担”相位锚”角色,注意力持续较高 - 换行符
\n:分隔各 turn 的结构 token,同样被高强度寻址 [(位置 12,system prompt 中的工具格式标记):模型在决策时主动回访了早期的格式范例
这与第八节的判断一致:结构上高度显著的 token 更容易成为控制锚。
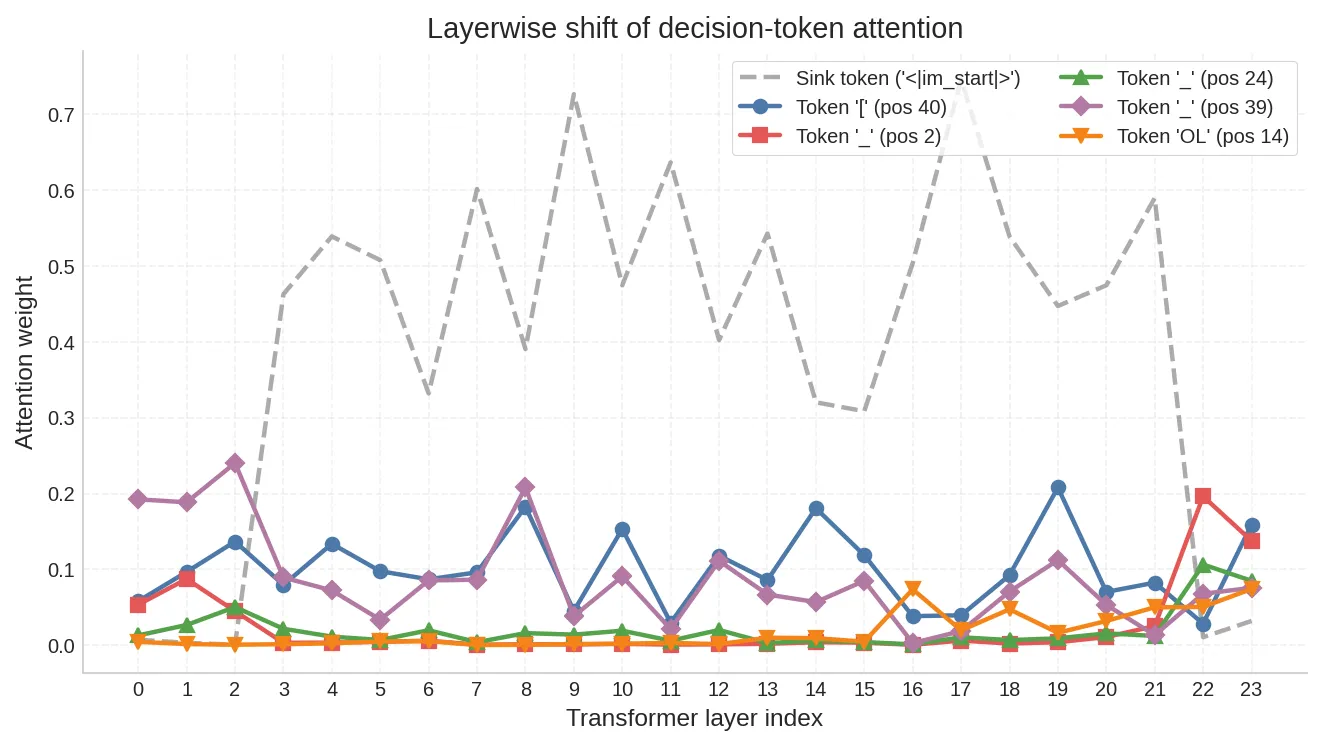
进一步追踪跨层演化,可以看到:
- Sink token(
<|im_start|>):在所有层中持续吸收大量注意力(灰色虚线),这是已知的 attention sink 现象 - Token
[(位置 40,决策位置自身):在 L0–L19 保持稳定的 0.1–0.2 注意力 - 最后三层(L21–L23):注意力急剧重新分配——sink 权重下降,
\n(位置 2)和OL(位置 14,TOOL 的一部分)等 token 的权重显著上升
模型在最后几层把注意力从泛化的结构锚转移到了具体的工具格式 token 上——正好对应 logit lens 中 TO 信号涌现的时机。
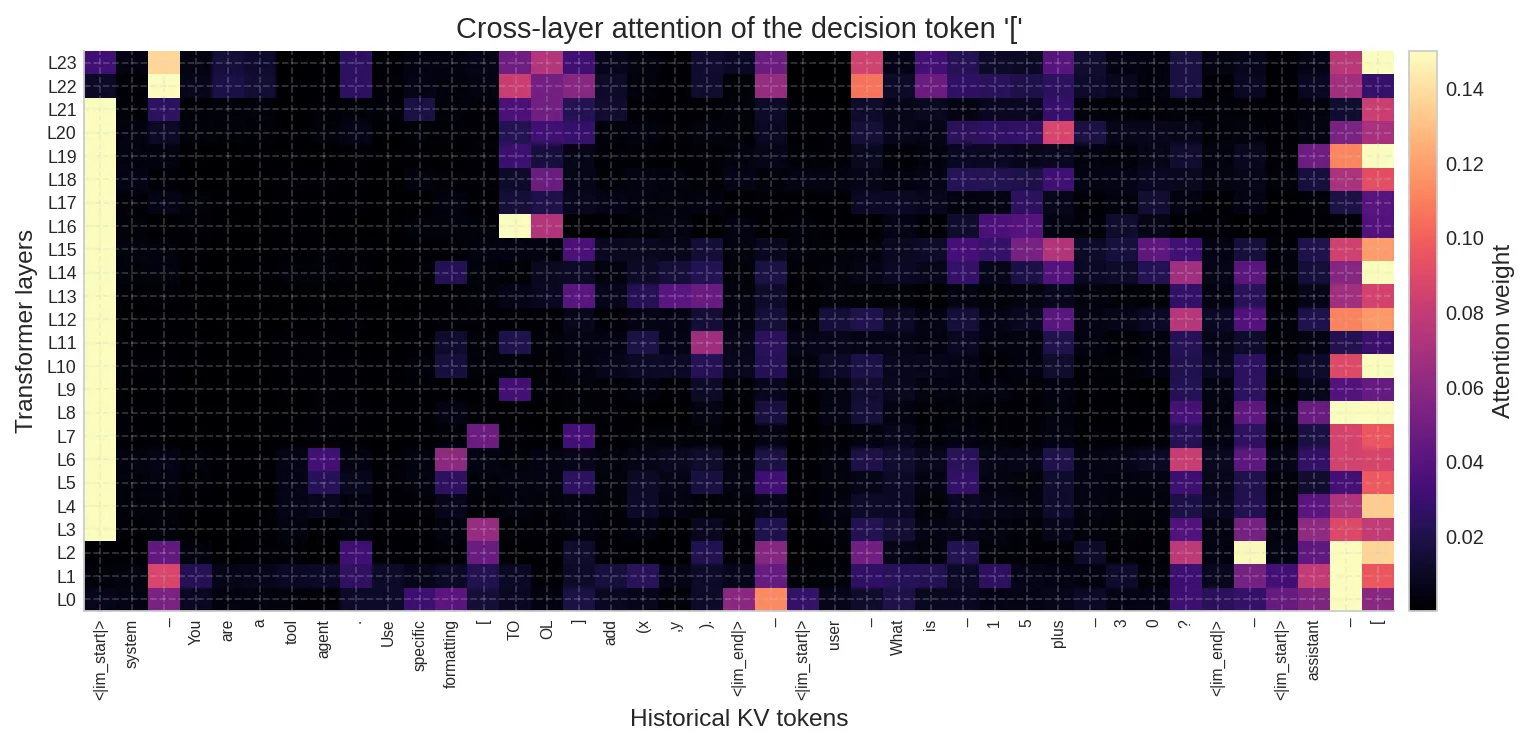
跨层热力图提供了更完整的全景:横轴是所有历史 KV token,纵轴是 Transformer 层级(从底到顶)。system prompt 区域(左侧)在高层持续被寻址,user query 区域(中部)的注意力相对稀疏。
但以上都是注意力观测——高注意力权重是因果线索,还不是因果证明。下面的消融实验和激活修补才是真正的因果干预。
11.4 KV Cache 消融:控制势能分布不均匀#
通过 register_forward_hook 在推理时直接清零特定位置的 K/V 矩阵(保留原始文本不变),可以精确测量每组 token 对工具调用决策的因果贡献。
核心实现:先用 prefix 生成完整的 KV Cache,再对 cache 中指定位置的 K/V 清零,最后只喂最后一个 token 做推理:
# 1. 用 prefix 生成完整 cache
prefix_outputs = model(prefix_ids, use_cache=True)
raw_past_kv = prefix_outputs.past_key_values
# 2. 深拷贝 cache 并清零目标位置的 K/V
import copy
new_cache = copy.deepcopy(raw_past_kv)
for i in range(len(new_cache.key_cache)):
new_cache.key_cache[i][:, :, ablate_positions, :] = 0.0
new_cache.value_cache[i][:, :, ablate_positions, :] = 0.0
# 3. 只喂最后一个 token,使用消融后的 cache
outputs = model(last_token_id, past_key_values=new_cache, use_cache=True)这比 attention_mask=0 的方式更准确——后者只是把注意力权重置零,K/V 矩阵本身并未被清除。
单点消融:清零单个 [ 的 KV
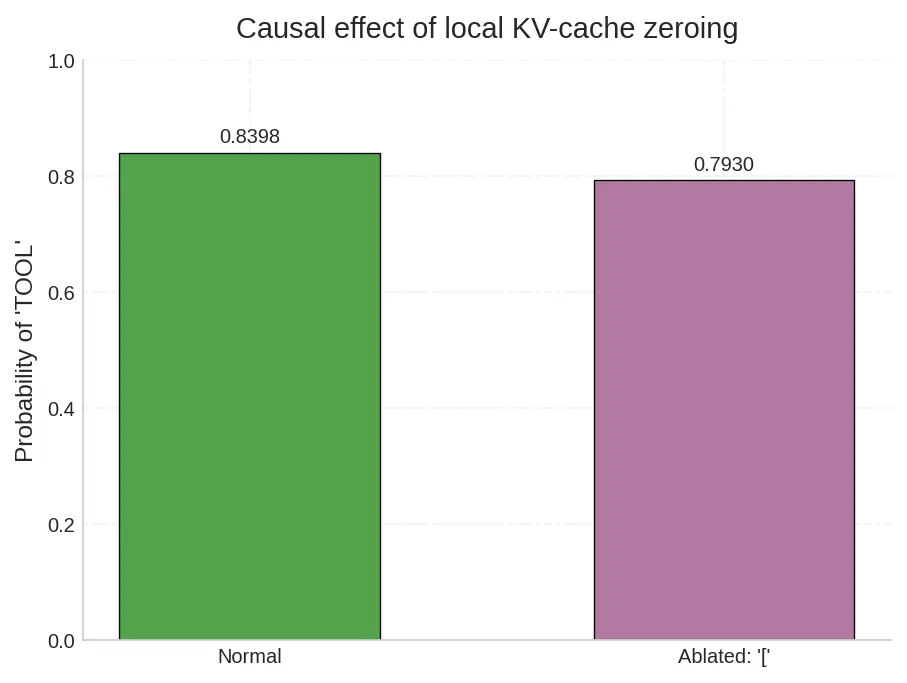
消融 system prompt 中 [(位置 12)的 KV 后,概率从 0.8398 降至 0.7930,仅下降 5.6%。
单个 token 的控制贡献有限——控制状态是分布式的,散布在多个 token 的 KV 中。
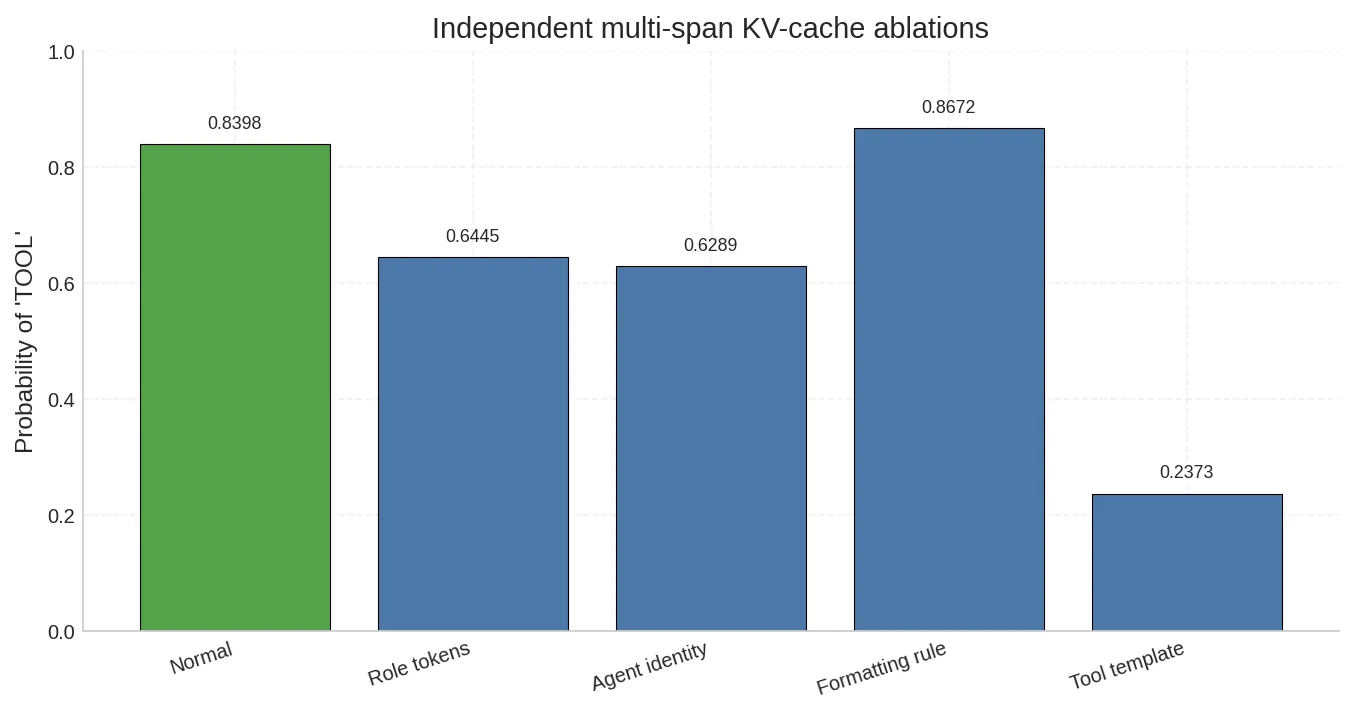
多组独立消融:哪类 token 控制势能最高
分别清零四类 token 的 KV,观察各自的独立影响:
| 消融目标 | 消融后概率 | 变化幅度 |
|---|---|---|
| 基准(无消融) | 0.8398 | — |
| Role tokens(结构标记) | 0.6445 | -23.3% |
Agent identity(tool agent) | 0.6289 | -25.1% |
Formatting rule(Use specific formatting) | 0.8672 | +3.3% |
Tool template([TOOL] add(x,y)) | 0.2373 | -71.7% |
结果非常清晰:
- Tool template 是压倒性的控制源。 清零这些 KV 后,概率直接从 84% 跌到 24%。具体的格式范例才是真正的高势能 token。
- Formatting rule 的消融反而略微提升了概率。 抽象指令
Use specific formatting与具体 template 之间存在微弱的竞争关系——去掉抽象描述后,模型更直接地依赖范例本身。 - Role tokens 和 Agent identity 有中等影响。 结构标记和身份声明提供了上下文框架,但对工具调用的直接驱动力不如具体范例。
这直接回应了第八节的问题。在这个实验中,控制势能的排序是:
具体格式范例 >> 角色标记 ≈ 身份声明 >> 抽象格式指令
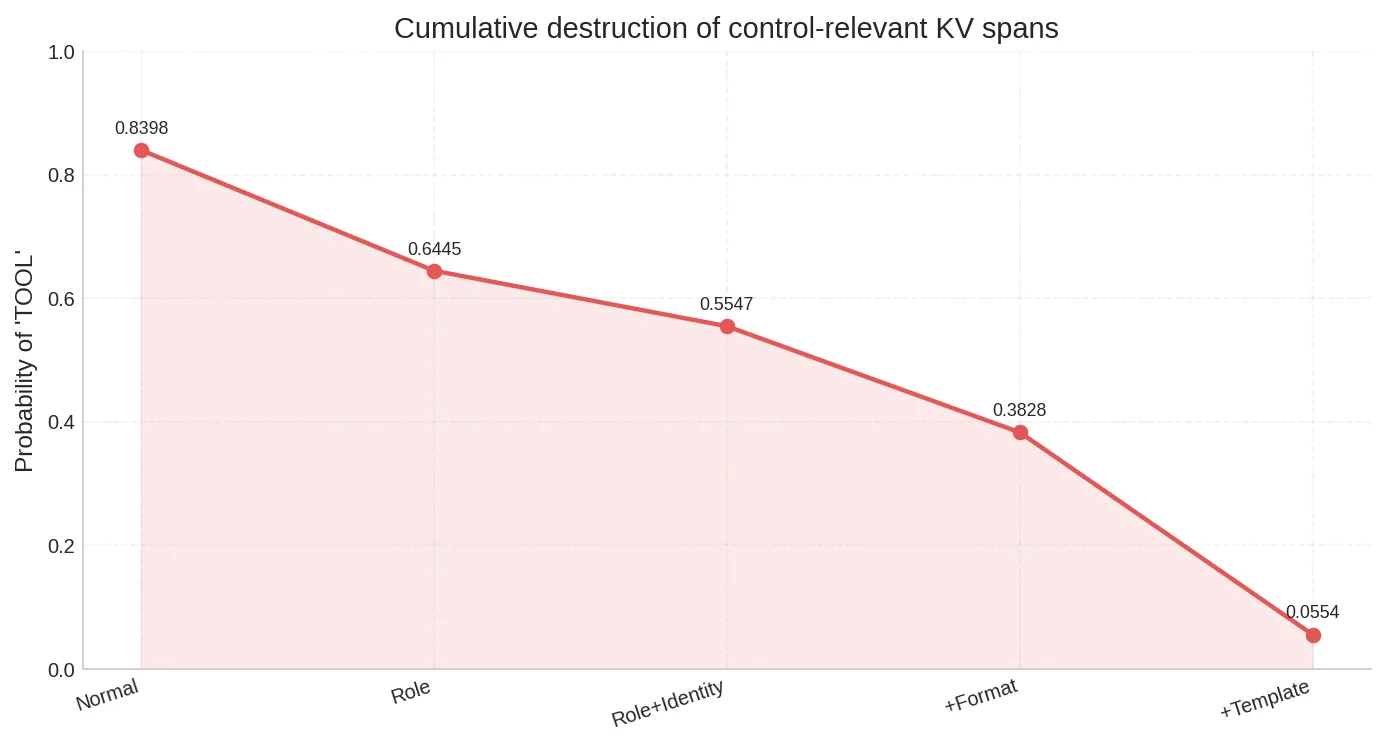
累积消融:控制状态的逐层瓦解
依次叠加消融 Role → Identity → Format → Template,观察概率的逐步退化:
| 累积阶段 | TOOL 概率 |
|---|---|
| Normal | 0.84 |
| + Role | 0.64(结构框架被破坏) |
| + Identity | 0.55(身份上下文丢失) |
| + Format | 0.38(格式约束消失) |
| + Template | 0.06(具体范例被抹除) |
这条衰减曲线说明两件事:
- 控制状态确实分布在多个 KV 寄存器中,每一组被清零都会造成不可逆的退化
- 最后一步(清零 template)造成了最大的断崖式下跌(0.38 → 0.06),再次确认具体范例是控制闭环中最关键的一环
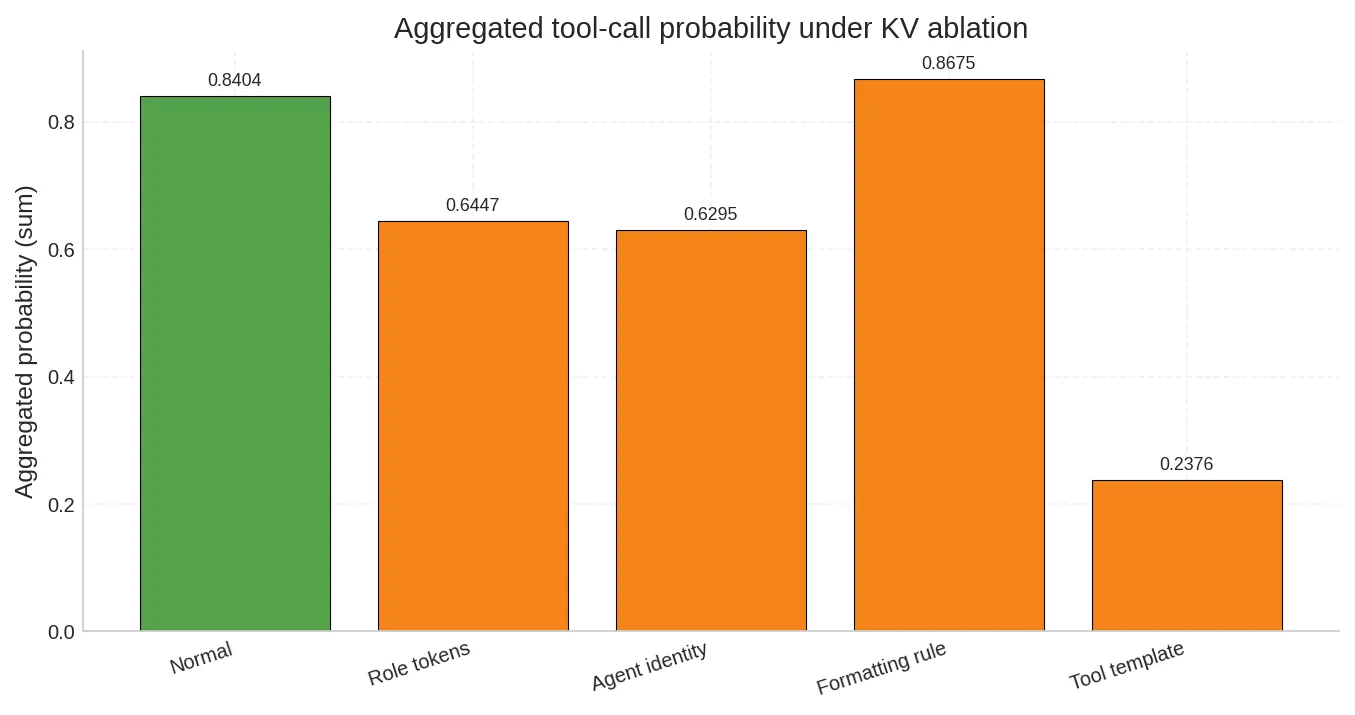
使用聚合指标(将所有工具调用相关 token 的概率加总)重复实验,结论完全一致。
11.5 激活修补:第 22 层是决策形成的因果关键#
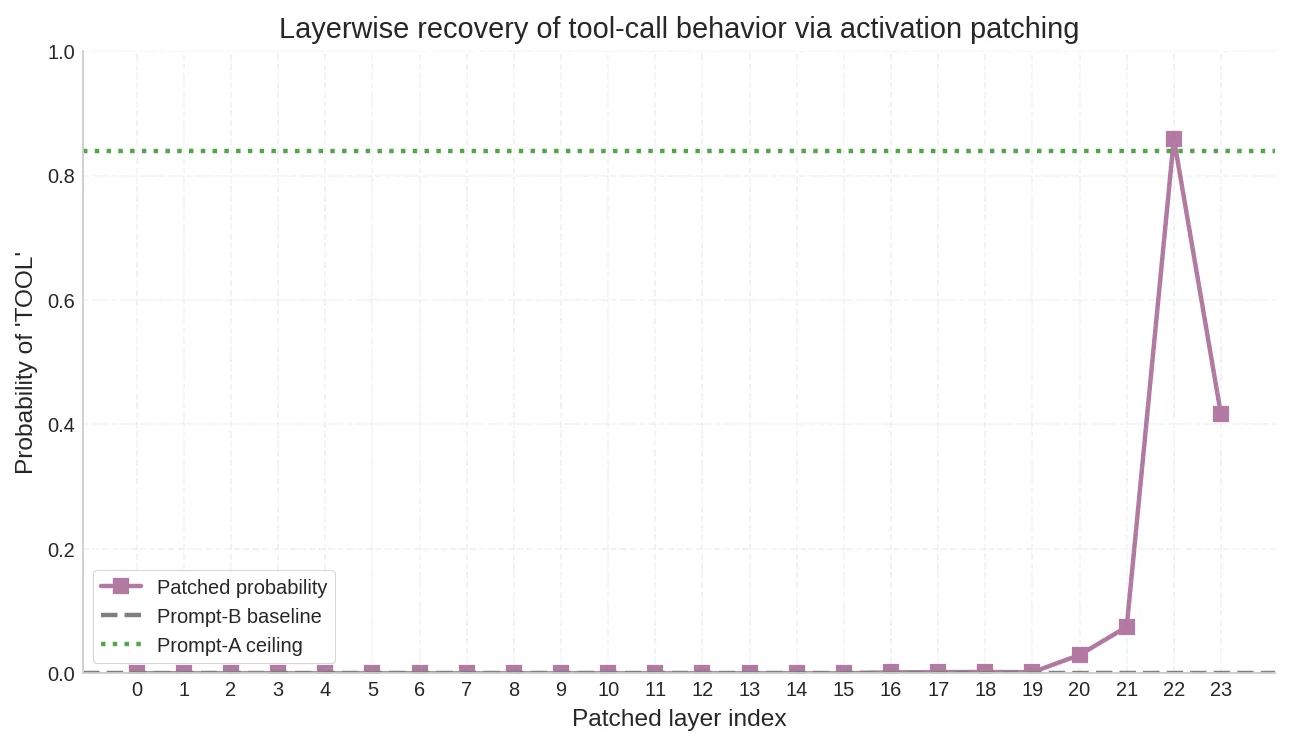
这是整组实验中因果证据最强的一个。
核心做法:对每一层,用 register_forward_hook 把 Prompt A 的隐藏状态 patch 到 Prompt B 的对应位置:
for layer_idx in range(num_layers):
# 取出 Prompt A 在第 layer_idx 层的最后位置隐藏状态
patch_state = hidden_states_a[layer_idx + 1][0, -1, :].clone()
def patch_hook(module, inputs, outputs):
out = outputs[0]
out[0, -1, :] = patch_state # 替换最后位置
return (out,) + outputs[1:]
handle = model_layers[layer_idx].register_forward_hook(patch_hook)
outputs_patched = model(**tokenize(prompt_b)) # 用 Prompt B 推理
handle.remove()
# 检查 Prompt B 的 TOOL 概率是否被"救回来"构造两段 prompt:
- Prompt A(含 system prompt):稳定触发工具调用,
TOOL概率 = 0.84 - Prompt B(无 system prompt):不触发工具调用,
TOOL概率 = 0.0001
对每一层 l,把 Prompt A 在第 l 层最后位置的隐藏状态 patch 到 Prompt B 的对应位置,观察 Prompt B 的 TOOL 概率能否被”救回来”。
结果极其清晰:
| 层范围 | 恢复程度 | 含义 |
|---|---|---|
| Layer 0–20 | ≈ 0.01(几乎无恢复) | 这些层的隐藏状态尚未编码出足够的工具调用信号 |
| Layer 21 | ≈ 0.03(微弱回升) | 控制信号开始凝聚 |
| Layer 22 | ≈ 0.86(完全恢复) | 决策在这一层形成 |
| Layer 23 | ≈ 0.42(回落) | 最后一层还需要额外的 MLP 和 LayerNorm 处理 |
三点关键发现:
-
工具调用决策在第 22 层(倒数第 2–3 层)形成。 之前所有层的 KV 读回、残差流积累,都在这一层被”结算”为具体的动作分布。
-
三条独立证据链在同一个位置汇合。 Logit Lens 显示
TO在 L22–23 涌现;attention tracing 显示 L22 注意力急剧重分配;activation patching 证明 L22 是因果瓶颈——三者完全一致。 -
这是充分性证明。 注意力观测只能给相关性,KV 消融给出必要性(拿掉就衰减),而 activation patching 给出充分性——把 L22 的状态搬过去,就能完整恢复行为。
11.6 实验小结#
| 假说 | 验证方法 | 结果 | 状态 |
|---|---|---|---|
| KV Cache 是跨步持久化核心载体 | KV 消融(Fig 5a–d) | 清零 KV 后概率大幅下降,文本仍在但控制丧失 | 支持 |
| 高控制势能 = 易命中的 key + 能改写决策的 value | 多组消融对比(Fig 5b) | 具体范例 >> 角色标记 >> 抽象指令 | 支持 |
| 控制同时走直接 KV 读回 + 新 token 写回两条路 | Attention tracing + 消融 | 直接读回路径已验证;路径二需要多轮生成实验进一步确认 | 部分支持 |
额外发现:
- 决策层定位:24 层模型中,工具调用决策在第 22 层形成(Activation Patching 证实)
- 控制势能 ≠ 语义重要性:抽象的
Use specific formatting反而有轻微负贡献,真正的控制杠杆在具体范例上
十二、对 Agent 工程意味着什么#
如果把上面的机制看清楚,会发现很多 Agent 设计经验其实都可以被重新表述成“控制状态设计原则”。
12.1 System Prompt 是控制面,而非说明文#
它不应该只是冗长散文,而应该尽量具备:
- 抽象度高
- 结构清晰
- 容易被未来很多位置重复利用
真正有效的 system prompt,往往是最容易被编码成高复用控制锚的,覆盖全面反而次要。
12.2 Tool Schema 不只是接口定义,而是控制接口#
它不仅规定参数格式,也会持续改写模型的动作分布。
一个写得差的 schema 往往会导致:
- 模型更犹豫要不要调用工具
- 参数字段更容易填错
- 输出更容易退化成自然语言解释
从机制角度看,这相当于 schema 没有形成足够稳定、足够显著的控制锚。
12.3 Planning / Reflection 是主动写控制寄存器#
要求模型“先想一想”“先列计划”,不只是为了让人类更容易审查。
在很多任务里,这实际上是在主动让模型提前写下一批未来可以反复寻址的控制 token。
这也解释了为什么 planning 并不是永远有效:
- 写得太空泛,后续 query 不会持续访问
- 写得太长太散,控制信号会被稀释
- scaffold 如果不消费这些计划,它们的杠杆也会下降
12.4 观测能力会成为 Agent 调优基础设施#
要优化 tool selection、memory update、reflection 质量,只靠”改 prompt 试试看”会越来越低效。
更好的方向是建设:
- token / span 级 ablation 工具
- KV cache 级可视化与消融工具
- probe / logit lens 监测
- 关键决策位置的 attention tracing
这会让 Agent 调优从经验主义,逐步走向可观测、可干预的机制工程。
十三、最后收束:这篇文章真正要推进的是什么#
把全文压成一句话,核心问题其实是:
Transformer 中,哪些 token 具有更高的控制势能?这些势能如何在残差流中被编码、在 KV Cache 中被持久化、再通过后续 query 的读回和 scaffold 的放大,转化为对 Tool Selection、Planning、Reflection 和 Memory Update 的持续偏置?
如果要再进一步压缩成一句最简结论,我会这样说:
Agent 中所谓”持续控制状态”,本质是某些早期 token 通过残差流被写入、通过 KV Cache 被持久化、通过后续 query 被反复读回,并在 scaffold 的放大下持续改写未来动作分布。
这件事的真正价值在于它改变了看待 Agent 的方式。
过去常把 prompt、tool schema、plan、reflection 看成”技巧”或”工作流习惯”;但如果从机制上看,它们更像是在模型内部和外部共同搭建的一套控制平面(control plane)。
一旦这样理解,后面的研究和工程目标就会非常清楚:
- 识别高控制势能 token
- 观察它们如何形成跨步状态
- 用因果干预去验证这条路径
- 再把验证结果回灌到 Agent 设计里
这才是“机制探索”真正值得推进的方向。